【強化学習#10】DQN
記事の目的
youtubeの「【強化学習#10】DQN」で解説した内容のコードです。
目次
1 環境とエージェント
import numpy as np import matplotlib.pyplot as plt import seaborn as sns np.random.seed(1)
from torch import nn from torch import optim import torch import numpy as np torch.manual_seed(1)
class Environment:
def __init__(self, size=3, lucky=[]):
self.size = size
self.lucky = lucky
self.goal = (size-1, size-1)
self.states = [(x, y) for x in range(size) for y in range(size)]
def next_state(self, s, a):
s_next = (s[0] + a[0], s[1] + a[1])
if s == self.goal:
return s
if s_next not in self.states:
return s
if s_next in self.lucky:
if np.random.random() < 0.8:
return self.goal
else:
return s_next
return s_next
def reward(self, s, s_next):
if s == self.goal:
return -1
if s_next == self.goal:
return 0
return -1
class Agent():
def __init__(self, environment):
self.actions = [(-1, 0), (0, -1), (1, 0), (0, 1)]
self.environment = environment
def action(self, s, a, prob=False):
s_next = self.environment.next_state(s, a)
r = self.environment.reward(s, s_next)
return r, s_next
2 DQN
class NN:
def __init__(self, agent):
self.model = self.model()
self.criterion = nn.MSELoss()
self.actions = agent.actions
def model(self):
model = nn.Sequential()
model.add_module('fc1', nn.Linear(4, 16))
model.add_module('relu1', nn.ReLU())
model.add_module('fc2', nn.Linear(16, 8))
model.add_module('relu1', nn.ReLU())
model.add_module('fc3', nn.Linear(8, 1))
self.optimizer = optim.Adam(model.parameters())
return model
def train_model(self, sa, labels, num_train=1000):
for _ in range(num_train):
qvalue = self.model(torch.tensor(sa).float())
loss = self.criterion(qvalue, torch.tensor(labels).float())
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
def q_max(self, state):
sa = []
for action in self.actions:
sa.append(state+action)
q = self.model(torch.tensor([np.array(sa)]).float()).detach()
a_max = np.argmax(q)
return self.actions[a_max], q[0,a_max,0]
def get_episode(agent, nn_model, epsilon=0.1):
s = agent.environment.states[np.random.randint(agent.environment.size**2-1)]
episode = []
while True:
if np.random.random() < epsilon:
a = agent.actions[np.random.randint(2,4)]
else:
a, _ = nn_model.q_max(s)
r, s_next = agent.action(s, a)
episode.append((s, a, r, s_next))
if s_next == agent.environment.goal:
break
s = s_next
return episode
def train(agent, nn_model, epsilon=0.1, num=100, num_train=1000):
for c in range(num):
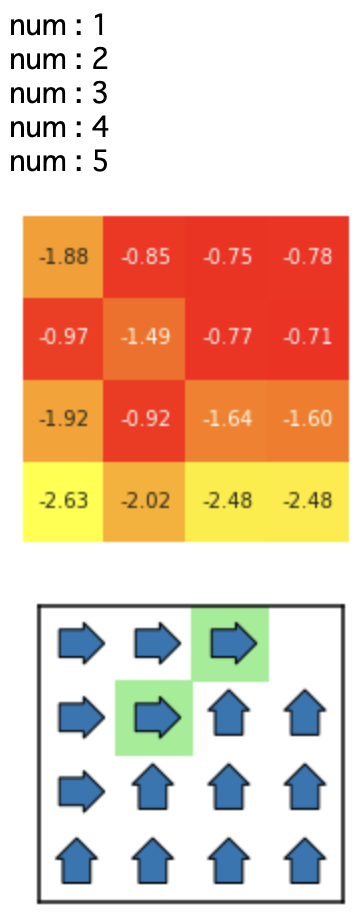
print(f'num : {c+1} ')
examples = []
for _ in range(100):
episode = get_episode(agent, nn_model, epsilon)
examples += episode
np.random.shuffle(examples)
sa = []
labels = []
for s, a, r, s_next in examples:
sa.append(s+a)
_, q_next = nn_model.q_max(s_next)
labels.append([r + q_next.detach()])
nn_model.train_model(sa, labels, num_train)
show_values(agent, model1)
show_policy(agent, model1)
3 可視化用関数
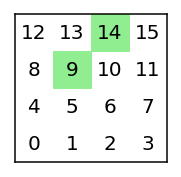
def show_maze(environment):
size = environment.size
fig = plt.figure(figsize=(3,3))
plt.plot([-0.5, -0.5], [-0.5, size-0.5], color='k')
plt.plot([-0.5, size-0.5], [size-0.5, size-0.5], color='k')
plt.plot([size-0.5, -0.5], [-0.5, -0.5], color='k')
plt.plot([size-0.5, size-0.5], [size-0.5, -0.5], color='k')
for i in range(size):
for j in range(size):
plt.text(i, j, "{}".format(i+size*j), size=20, ha="center", va="center")
if (i,j) in environment.lucky:
x = np.array([i-0.5,i-0.5,i+0.5,i+0.5])
y = np.array([j-0.5,j+0.5,j+0.5,j-0.5])
plt.fill(x,y, color="lightgreen")
plt.axis("off")
def show_values(agent, nn_model):
fig = plt.figure(figsize=(3,3))
result = np.zeros([agent.environment.size, agent.environment.size])
for (x, y) in agent.environment.states:
a_max, q_max = nn_model.q_max((x, y))
result[y][x] = q_max
sns.heatmap(result, square=True, cbar=False, annot=True, fmt='3.2f', cmap='autumn_r').invert_yaxis()
plt.axis("off")
def show_policy(agent, nn_model):
size = agent.environment.size
fig = plt.figure(figsize=(3,3))
plt.plot([-0.5, -0.5], [-0.5, size-0.5], color='k')
plt.plot([-0.5, size-0.5], [size-0.5, size-0.5], color='k')
plt.plot([size-0.5, -0.5], [-0.5, -0.5], color='k')
plt.plot([size-0.5, size-0.5], [size-0.5, -0.5], color='k')
for i in range(size):
for j in range(size):
if (i,j) in agent.environment.lucky:
x = np.array([i-0.5,i-0.5,i+0.5,i+0.5])
y = np.array([j-0.5,j+0.5,j+0.5,j-0.5])
plt.fill(x,y, color="lightgreen")
rotation = {(-1, 0): 180, (0, 1): 90, (1, 0): 0, (0, -1): 270}
for s in agent.environment.states:
if s == agent.environment.goal:
direction=None
else:
a_max, q_max = nn_model.q_max(s)
direction = rotation[a_max]
if direction != None:
bbox_props = dict(boxstyle='rarrow')
plt.text(s[0], s[1], ' ', bbox=bbox_props, size=8,
ha='center', va='center', rotation=direction)
plt.axis("off")
4 シミュレーション
env1 = Environment(size=4, lucky=[(1,2), (2,3)]) agent1 = Agent(env1) show_maze(env1)
train(agent1, num=10000)